开源运动控制器和CNC控制器和机器人控制板等原理图PCB图源码等
人气:4136
发表时间:2021-02-15
开源(附PDF格式原理图 PDF格式PCB图 BOM表 源码等)
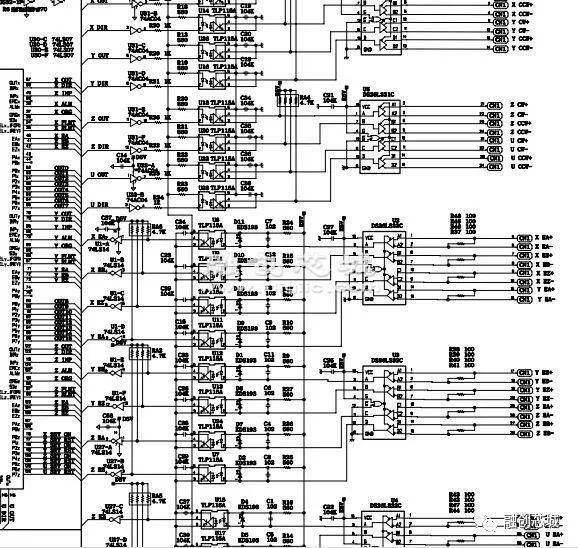
运动控制器:韩国朋友提供(采用日本的专用4轴运动控制芯片);
可控制4轴伺服或步进,4轴联动、支持S型加减速,插补运算等,带编码器反馈,最高脉冲输出好像是5M(差分输出),输入、输出全部采用高速光耦隔离等;
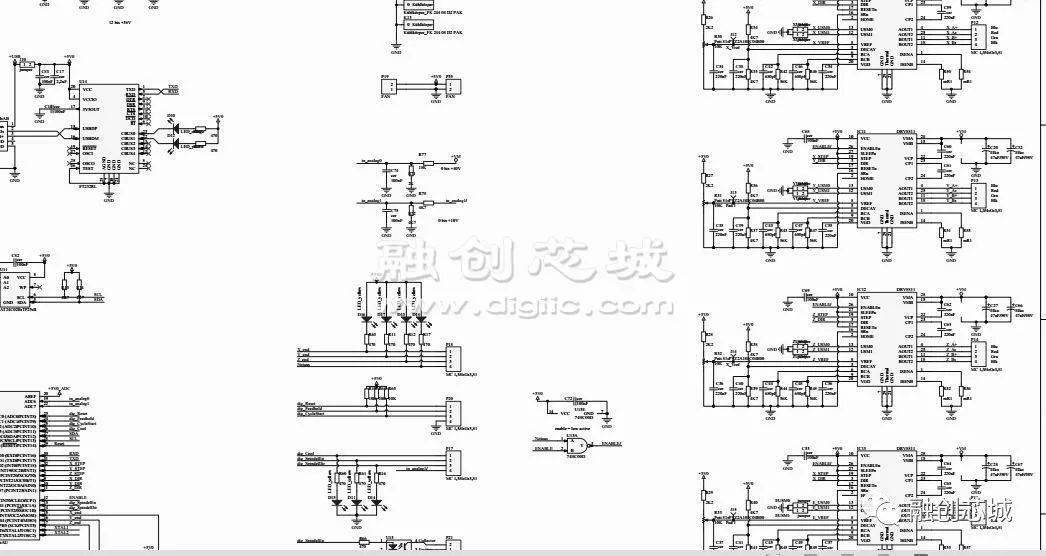
CNC控制器:欧洲工程师设计,采用ATME芯片作为主控;
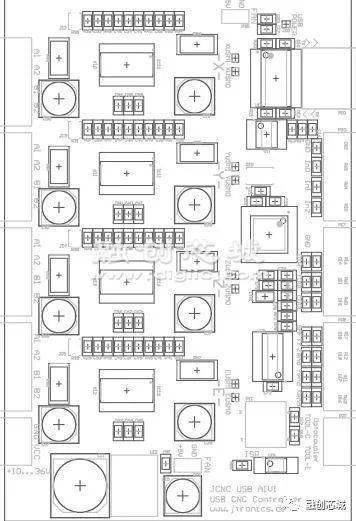
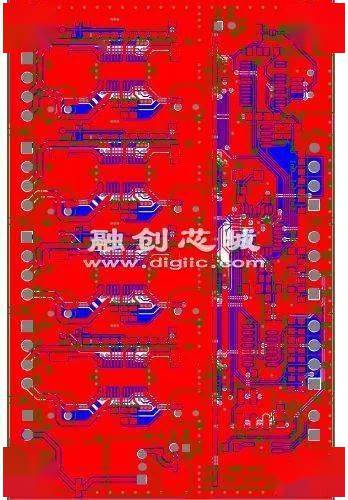
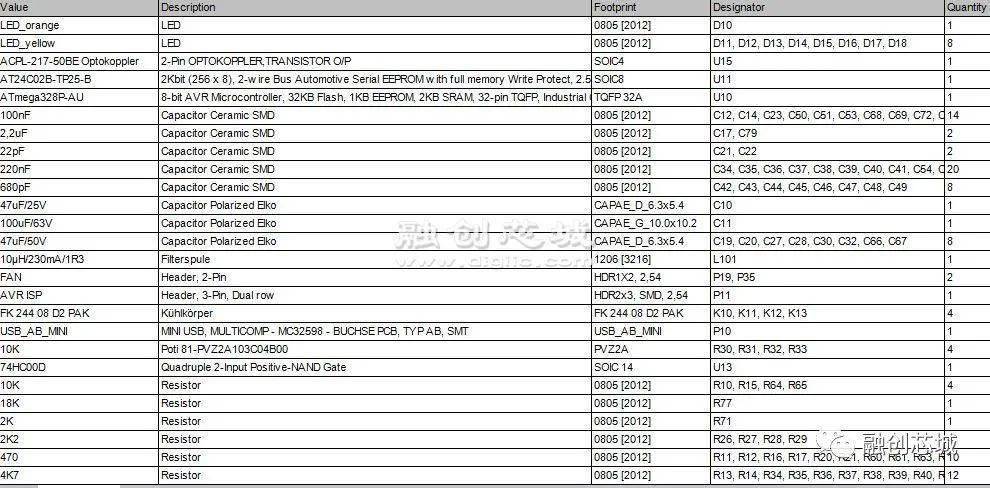
采用DC-DC降压电源,板载4路步进电机驱动,多路模拟量输入输出,USB转串口电路,EEPROM存储器电路等;
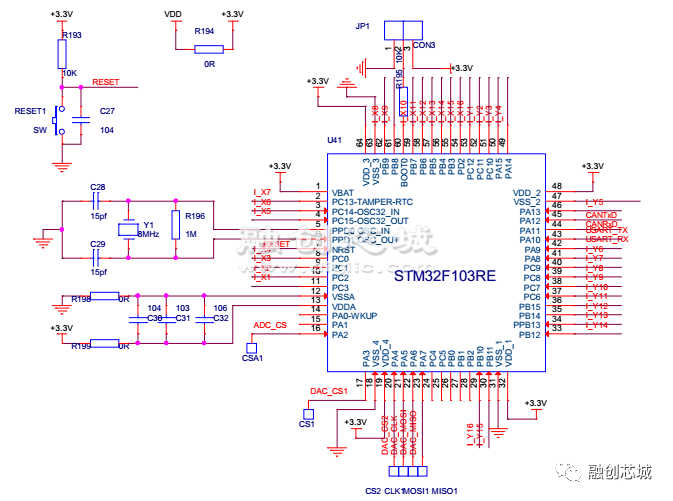
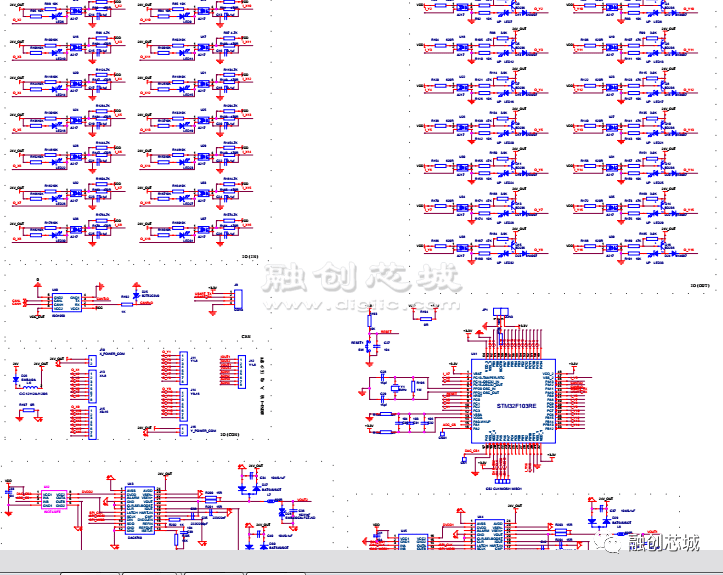
机器人控制板:杭州的朋友提供(采用ST芯片作为主控,工业级设计、输入输出全部光耦隔离、模拟量输入、输出都带隔离、通讯隔离以及保护等);
简单介绍:
运动控制器:韩国朋友提供(采用日本的专用4轴运动控制芯片)
可控制4轴伺服或步进,4轴联动、支持S型加减速,插补运算等,带编码器反馈,最高脉冲输出好像是5M(差分输出),输入、输出全部采用高速光耦隔离等
CNC控制器:欧洲工程师设计,采用ATME芯片作为主控
原理图
器件分布图
PCB图
BOM表
源码
机器人控制板:杭州的朋友提供(采用ST芯片作为主控)
输入:16路,光耦隔离且每路带指示灯;
输出:16路,光耦隔离且每路带指示灯带驱动;
2路模拟量输输入:带隔离输入;
4路模拟量输出:带隔离模拟量输出(其中2路电压、2路电流);
通讯:隔离