致力于工业机器人与光子神经网络的计量测试
工业机器人是当代高端智能装备和高新技术发展的重要成果,直接衡量一个国家的制造业水平和核心竞争力。制造强国战略中明确将机器人产业列为十大重点发展领域之一,加快工业机器人及智能制造产业的发展离不开以计量测试为技术手段的质量保障基石。
一、发展历程
早在中国古代便有设计并运用机器来取代人力的各种奇思妙想,例如西周时期工匠研发出能歌善舞的机器;春秋后期《墨经》记载鲁班设计了能在空中飞行“三日不下”的木鸟;三国时期诸葛亮制造出用于运送军粮的 “木牛流马”。放眼国外,瑞士的钟表匠利用齿轮和发条原理,在1773年制造了自动书写玩偶和自动演奏玩偶等。
但真正意义上的工业机器人是在近代才出现,自美国于1962年推出世界上第一台Unimate型工业机器人以来,机器人在工业发达国家得到了迅速发展。1968年,美国斯坦福研究所研发了机器人Shakey,它带有视觉传感器,能根据人的指令发现并抓取积木,算是第一台智能机器人。Shakey的诞生拉开了第三代机器人研发的序幕。1969年,日本早稻田大学加藤一郎实验室研发出第一台以双脚行走的机器人,加藤一郎也因此被誉为“仿人机器人之父”。1978年,美国Unimation公司推出通用工业机器人PUMA,这标志着工业机器人技术已经完全成熟。1987年,国际标准化组织对机器人做出了如下定义:
机器人的动作机构具有类似于人或其他生物的某些器官(肢体、感受等)的功能;
具有通用性,可从事多种工作,可灵活改变动作程序;
具有不同程度的智能,如记忆、感知、推理、决策、学习等;
具有独立性,完整的机器人系统在工作中可以不依赖于人的干预。
自Unimate型工业机器人之后,工业发达国家的工业机器人飞速发展。尤其在工业互联网时代,在智能制造过程中,工业机器人成为不可缺少的自动化装备和执行终端。工业机器人广泛应用于各行各业,主要进行焊接、装配、搬运、加工、喷涂、码垛等复杂作业,极大解放了人类的体力劳动,改善了劳动条件,提高了制造业自动化水平、产品质量和生产效率,并增强了企业市场竞争力。工业机器人涉及机械、电子、控制、计算机、人工智能、传感器、通讯与网络等多个学科和领域,是多种高新技术发展成果的综合集成。我国的机器人研究自上世纪80年代“七五”科技攻关开始,从单纯的研发机器人技术向机器人技术与自动化工艺装备扩展,形成了以沈阳新松机器人自动化股份有限公司为代表的一批本土企业。目前,国内的机器人代表性公司有:沈阳新松机器人自动化股份有限公司、首钢莫托曼机器人有限公司、北京博创科技、北京森汉科技有限公司、上海英集思机器人、北京智能佳机器人、上海未来伙伴机器人有限公司、广州中鸣机器人有限公司、 深圳市中科鸥鹏智能科技有限公司。但我国的工业机器人技术及其工程应用水平在核心零部件、精度和可靠性等方面与欧美和日本相比还有一定的距离。


工业机器人与服务机器人
二、在制造强国战略中的作用
工业机器人是当代高端智能装备和高新技术发展的重要成果,直接衡量一个国家的制造业水平和核心竞争力。当前我国高端机器人严重依赖进口,其中减速机、伺服电机、控制器等关键零部件大部分依赖进口。制造强国战略中提出机器人产业的发展要围绕汽车、机械、电子、危险品制造、国防军工、化工、轻工等工业机器人应用以及医疗健康、家庭服务、教育娱乐等服务机器人应用的需求,积极研发新产品,促进机器人标准化、模块化发展,扩大市场应用。突破机器人本体、减速器、伺服电机、控制器、传感器与驱动器等关键零部件及系统集成设计制造技术等技术瓶颈。明确我国未来十年机器人产业的发展重点主要为两个方向:一是开发工业机器人本体和关键零部件系列化产品,推动工业机器人产业化及应用,满足我国制造业转型升级的迫切需求;二是突破智能机器人关键技术,开发一批智能机器人,积极应对新一轮科技革命和产业变革的挑战。
针对机器人与工业机器人,我国出台了系列产业激励政策:2012 年5月,工信部《智能制造装备产业“ 十二五”发展规划》指出:要攻克工业机器人本体、精密减速器、伺服驱动器和电机、控制器等核心部件的共性技术,自主研发工业机器人工程化产品,实现工业机器人及其核心部件的技术突破和产业化。2012 年7月,国务院《“十二五”国家战略性新兴产业发展规划》中强调:要大力推进泛在感知自动控制系统、工业机器人、关键零部件等装置的开发和产业化。2013 年12 月,工信部《关于推进工业机器人产业发展的指导意见》提出:到2020 年形成较为完善的工业机器人产业体系,培育3~5 家具有国际竞争力的龙头企业和8~10 个配套产业集群,机器人密度(每万名员工使用机器人台数)要达到100 以上。强国战略中明确了9 项战略任务和重点,其中高档数控机床和机器人作为十个重点领域之一。2016 年4 月,工信部、国家发展改革委、财政部等三部委联合印发《机器人产业发展规划(2016-2020年)》,提出加强机器人标准体系建设。开展机器人标准体系的顶层设计,构建和完善机器人产业标准体系,加快研究制订产业急需的各项技术标准,支持机器人评价标准的研究和验证,积极参与国际标准的制定和修订。
三、关键参数与计量测试
在我国机器人产业发展和计量测试领域,中国机器人产业联盟成立于2013年4月21日,目前已有成员单位380余家。联盟秘书处设立在中国机械工业联合会。2015年9月,国家标准化管理委员会批准成立国家机器人标准化总体组和专家咨询组,2017年发布中国机器人标准化白皮书,总结了国内外工业机器人产业现状与趋势,标准体系结构和框架等。
工业机器人一般由机械系统、控制系统、驱动系统和智能系统四个部分组成。机械系统是工业机器人的执行机构,一般由手部、腕部、臂部、腰部和基座组成。手部又称为末端执行器,是工业机器人对目标直接进行操作的部分,基座是整个机器人的支撑部分,有固定式和移动式两种,其他部位主要用于改变手部的空中姿态。控制系统实现埘操作机的控制,一般由控制计算机和伺服控制器组成。驱动系统包括驱动器和传动机构。智能系统是机器人的感知执行系统,由感知和决策两部分组成。感知主要靠硬件(如各类传感器)实现,决策主要靠软件(如专家系统)实现。
对工业机器人的精度进行计量测试,主要涉及位姿精度、重复位姿精度、轨迹精度、重复轨迹精度等。其中位姿精度是指指令位姿和从同一方向接近该指令位姿时各点到位置中心之间的偏差。重复位姿精度是指对同指令位姿从同一方向重复响应n次后实到位姿的不一致程度。轨迹精度是指机器人机械接口从同一方向n次跟随指令轨迹的接近程度。轨迹重复精度是指对一给定轨迹在同方向跟随n次后实到轨迹之间的不一致程度。
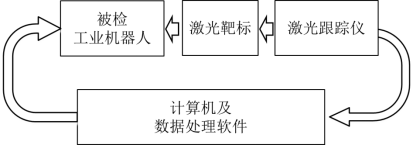
工业机器人性能参数计量测试框架主要由激光跟踪仪、激光靶标和计算机及数据处理软件组成。正确安装激光跟踪仪后,打开跟踪仪电源,开启工业机器人测量软件,进入“机器人校准”功能主界面。激光跟踪仪测量原理主要是通过测量两个角度和一个距离来确定目标靶球的坐标。这些角度由安装在顶点角轴和方位角轴上的编码器来测量,径向距离由测距仪进行计量校准。
四、中国泰尔实验室测试案例

中国泰尔实验室利用激光跟踪仪,实现了位姿精度、重复位姿精度、轨迹精度、重复轨迹精度等关键性能参数的计量测试。测试过程中激光波长637nm,最大功率390mw,激光安全属于Class I,但在操作过程中仍然需要做好防护,避免眼睛直视。激光跟踪仪的光学接收端面和激光靶标的端面需要洁净,避免污损对实验结果带来的影响。实验中,因为激光靶标是通过磁力吸附在工业机器人关节上,因此极容易跌落造成靶标的摔坏,需要使用防护工具,如海绵地垫、靶球防护夹具等。实验过程中,大多数情况下的光学表面主要污损物为灰尘,通过压缩空气罐清洁即可,不宜使用干棉布或棉纸擦拭光学表面,这将导致光学表面刮花,损坏反射表面,从而影响测量结果。
对实验结果造成的影响还包括:激光跟踪仪线性测量误差引入的不确定度分量,由测量点坐标转换计算误差引入的不确定度分量,这些都是仪器自身和软件计算所造成的影响因素。另外,还存在环境变化所带来的影响,环境的振动会引起被测工业机器人和测量仪器的相对运动,从而导致测量结果呈随机分布。测量期间,环境、仪器以及被测机器人都会产生漂移或变化,温度变化会导致材料膨胀,进而影响到测量结果的准确性。
面向新一代人工智能的发展需求,除了工业机器人的计量测试,中国泰尔实验室还开展了光子神经网络系统的测试,进行了对硅基光子神经网络原型芯片的测试,主要完成智能系统中模式分类识别和复杂电磁信号分析等方面的功能验证。测试指标包括:光子神经网络仿真系统输入信号数;光子神经网络仿真系统网络层数;单个神经元响应时间;光子神经网络芯片原型输入信号数;光子神经网络芯片原型单次计算速度;光子神经网络芯片原型识别模式数等。
工业机器人在现代制造业中占据举足轻重的地位,直接衡量了一个国家的制造业水平和核心竞争力。中国泰尔实验室将为推动我国开创制造强国和网络强国建设新局面而做出不懈努力。
中国泰尔实验室是我国信息通信领域规模最大、技术领先的计量检测实验室,仪表计量、检测联系方式:
联系人:张欣
电 话:18901066661(微信同步)