伺服驱动器是怎样来驱动伺服电机?
人气:1971
发表时间:2021-05-27
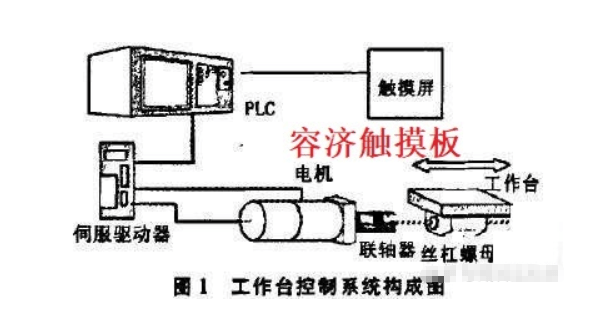
伺服驱动器又称为“伺服控制器”、“伺服放大器”,工作原理是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位,目前是传动技术的高端产品。
是通过放大plc发出的脉冲信号来驱动?
不是简单放大,PLC输出的只是方波,而驱动器输出的是正弦波。可以理解成PLC的脉冲是伺服驱动器的工作指令,好比领导的工作指示,伺服驱动器是给领导干活的干事,领导要求干事的这么干,干事的具体如何做还是要自己动脑筋的。伺服驱动器,可以理解成一个能满足伺服电机工作的交流电源,它驱动伺服电机时候,并不是直接把PLC的脉冲简单放大而是理解这些脉冲是做什么的,然后通过PWM方式模拟输出正弦波来控制伺服电机工作。
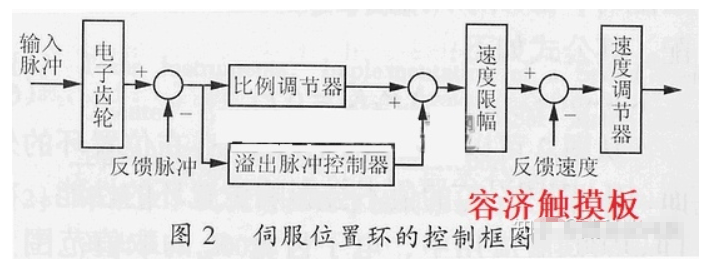
一般PLC发脉冲,是PLS脉冲,就是脉宽和间隔是固定的方波,这个方波的个数,可以理解成“步距”,就是一个脉冲下来,伺服电机要走“一步”(就是转动多少角度),所以脉冲方波个数越多,伺服电机转动的角度就对于越多,所以伺服驱动器就要输出能让伺服电机转动多少角度的波形了,但是伺服电机无法像步进电机那样来靠电机结构简单完成了,它需要有个位置环来做闭环,也就是靠编码器的脉冲测量当前的电机转角变化了多少,然后再通过PID来调整输出电压和输出频率了。
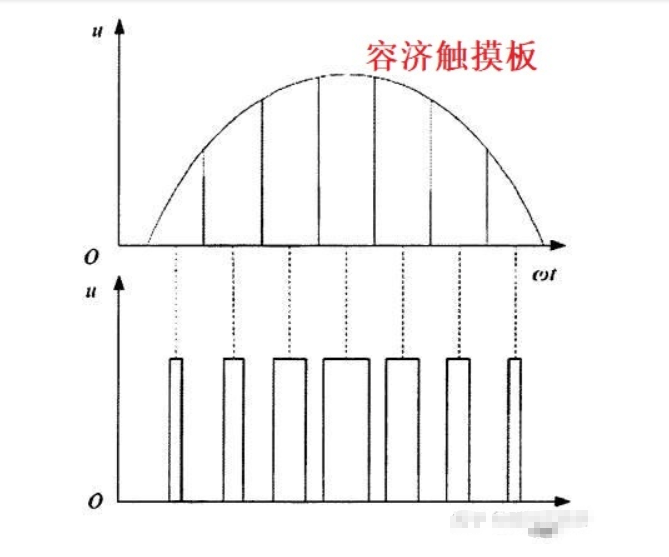
也就是伺服驱动器要把接受到的PLC脉冲和电机反馈回来的编码器脉冲来比较(可以简单理解成相减),然后经过PID计算后输出一个值,再给到所谓速度环和电流环,再计算,最后通过PWM手段来控制IGBT模块,输出一定方波来模拟正弦波控制伺服电机的转速来满足它要转动到什么角度位置。从底层的角度来看,伺服驱动器的控制和矢量变频器的控制是差不多的。









