捷联式惯性导航系统是将惯性传感器直接固连在载体上,具有体积小,重量轻,可靠性高,维护成本低等优点。同时,由于惯性传感器直接固连在载体上,陀螺仪与加速度计与载体一起经历角运动和线运动,更容易产生误差,导致系统精度下降。当载体处于高动态环境下,数据输出更加不稳定。因此高旋、高过载环境对惯性测量单元的性能提出了更高的要求。
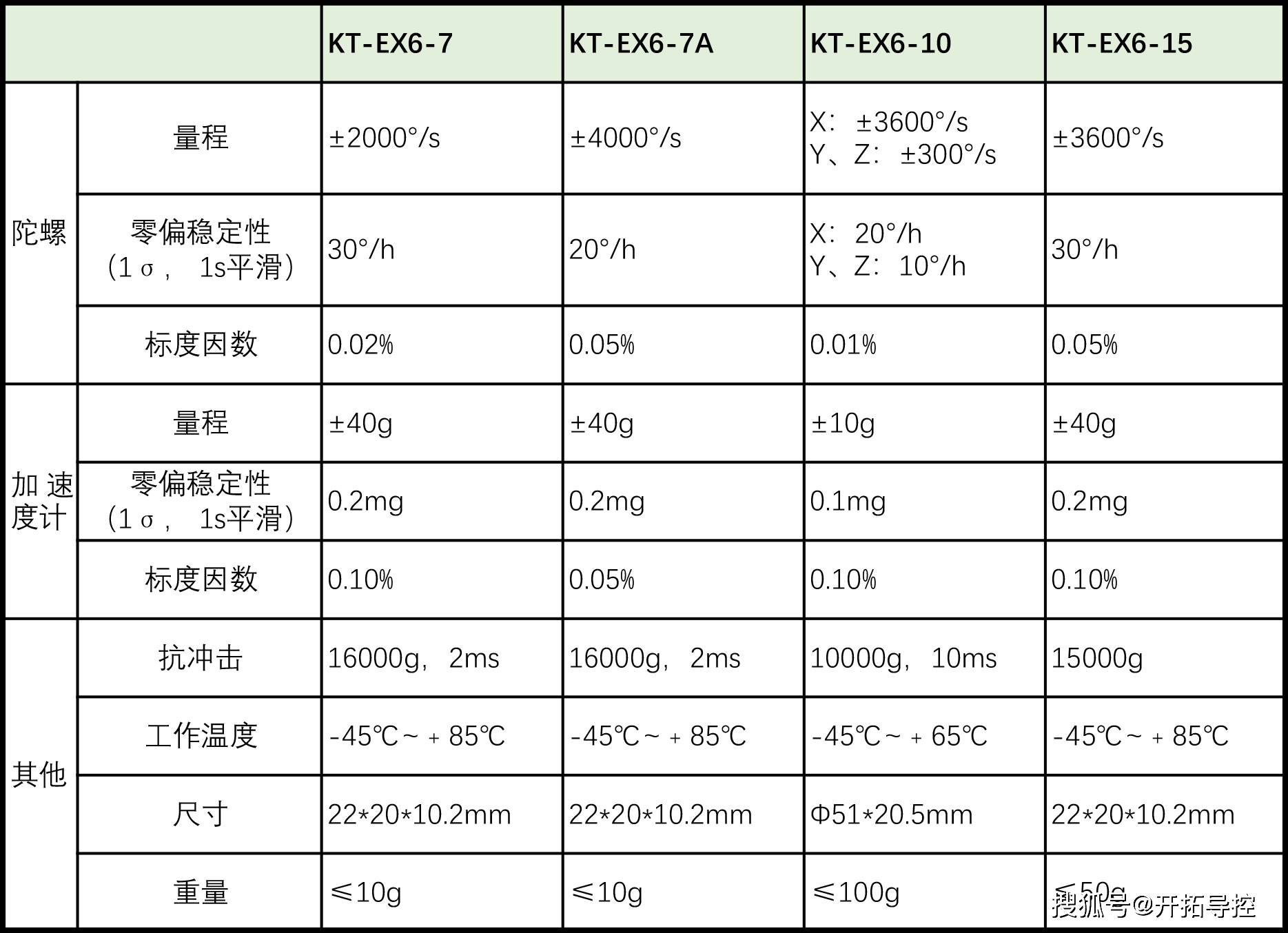
在高旋,高过载环境下,对于惯性测量单元的要求主要集中在量程,抗冲击和稳定输出三大指标。下图所示