用鸿蒙开发板做一个报警器,超简单
通过前面两篇贴子的介绍,相信大家已经掌握如何使用 Python 操作 GPIO 和 I2C 了。

那么今天我们可以更进一步,通过 Python 中的 GPIO 和 PWM 接口使蜂鸣器发声。
当然,如果只是实现这个功能就太无聊了,所以我们可以扩展一下,做个稍微有意思一些的东西。
嗯。。。想想做点啥呢?!翻箱倒柜一番之后,我找到了下面这块扩展板。
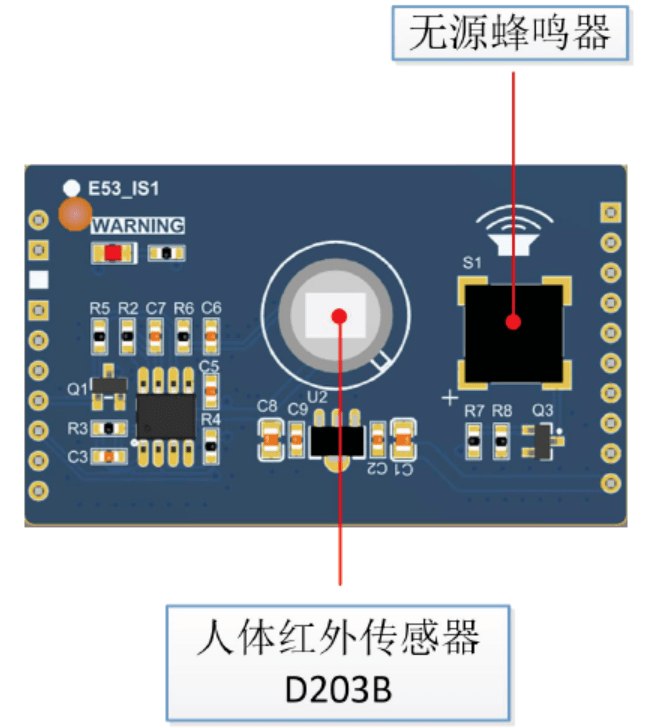
这是小熊派鸿蒙开发套件中的“智慧安防”扩展板,板子上搭配了一个红外传感器和一个蜂鸣器。
基于这个板子,可以开发一个简单的安防案例:当红外传感器有感应(有人靠近)时,触发蜂鸣器发出警告(发声)。
在开始之前需要先介绍一个新概念:脉冲宽度调制(Pulse max-width: 100%; width Modulation),即:PWM。
这是一个属于硬件电路层面的概念,对于物联网开发来说不需要特别深入的对它进行研究,只需要掌握基本原理后应用到开发中即可。
简单的说,PWM 就是利用数字信号输出模拟信号的一种技术。众所周知,现代计算机系统是数字驱动的,即:所有计算机部件在高低电平的交替驱动下工作。
如果所有的外设都是数字的,那么事情就很简单了,直接 GPIO 连接就可以通信。
然而,有些外设就不是数字的,而是模拟的,需要接收模拟信号(如:正弦波信号),所以需要借助处理器使用 PWM 技术实现模拟信号。
基本原理如下:
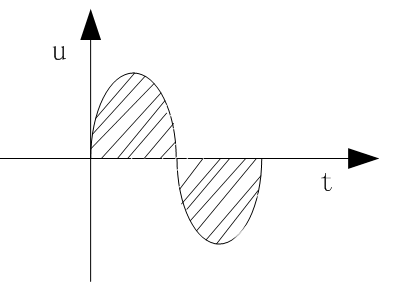
根据电工电子学老师的说法,如果需要产生这样的一个正弦波,可以用多个方波代替,其效果是相同的。
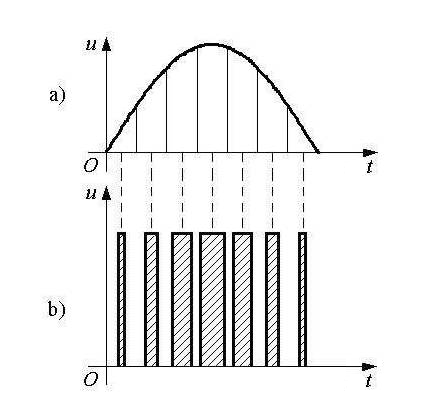
图 a) 中的正弦波可以用一个个幅值相同但是宽度不同的方波代替,如图 b) ,只要这些方波与 t 轴围起来的面积和原始正弦波与 t 轴围起来的面积相同即可。
有了上面的原理之后,接下来需要讨论的就是:如何调节出等效的方波?
为了解决这个问题,需要了解占空比的概念!占空比指在一个周期内,信号处于高电平的时间占据整个信号周期的百分比。
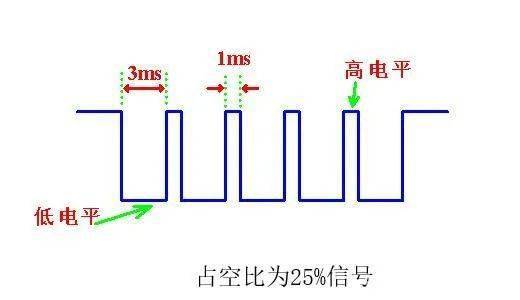
在上图中一个周期是 4ms ,而高电平在一个周期中的持续时间是 1ms,所以占空比为 25% 。
掌握了这些理论性的东西之后,就可以考虑如何实操的问题了:怎么实现 PWM 信号(方波信号)输出?
很幸运,Hi3861中自带了 PWM 模块,所以在代码层面只需要调用相关 API 接口向 PWM 模块设置必要参数,就可以输出需要的连续 PWM 信号(方波信号)。

上面表格中的接口功能可谓一目了然,几乎可以做到“开箱即用”,唯一需要做解释的就是 start(port,duty,freq)这个函数。
port 表示 PWM 信号的输出通道编号,freq 用于控制 PWM 信号的输出频率,duty 用于指定占空比,占空比的值为 duty 和 freq 的比值。
Ok!有了这些铺垫,可以上代码了!
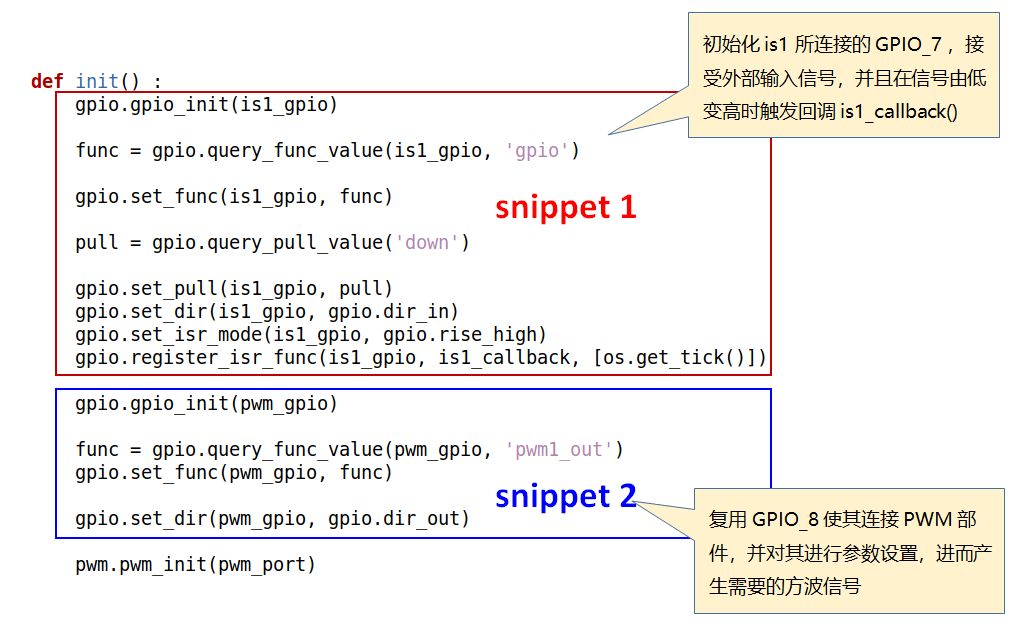
Snippet 1部分的代码先对 GPIO_7 进行初始化和功能设置,目的是接收 is1 也就是红外传感器的感应信号,当 Hi3861 接收到这个红外感应信号就会触发回调 is1_callback 。
Snippet 2 部分的代码复用 GPIO_8 使其连接 PWM 模块,目的是对 PWM 进行参数设置。
这里可以更进一步的给大家科普一下 GPIO 和 PWM 的关系:在理论上可以直接用 GPIO 产生需要的方波信号,但现实中并不会这么做!
原因很简单,这么做会耗费大量的处理器资源,并且产生的方波信号频率有限。
所以,一般都会引入独立的 PWM 模块,处理器通过 GPIO 与这个模块连接在一起,从而能够对其进行参数设置。之后,具体产生方波的工作就由 PWM 模块完成了。
接下来,看看回调函数 is1_callback 的实现。
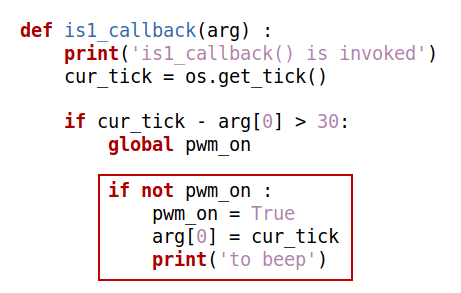
代码很简单,核心部分就是对变量 pwm_on 进行标记,即:当接收到红外感应信号的时候将 pwm_on 赋值为 True。
然后呢?然后在别处进行处理!
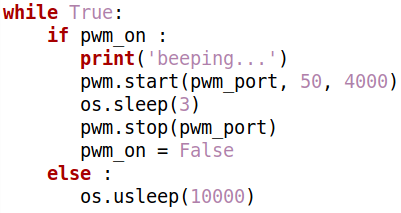
脚本文件的最后,可以看到处理 pwm_on 为 True 的代码,即:当 pwm_on 为 True 时,调用 start 函数促使 1 号 PWM 通道产生方波信号。
而 1 号 PWM 通道连接的是一个蜂鸣器,产生方波信号的最终结果就是使得蜂鸣器发声。
整体流程如下:
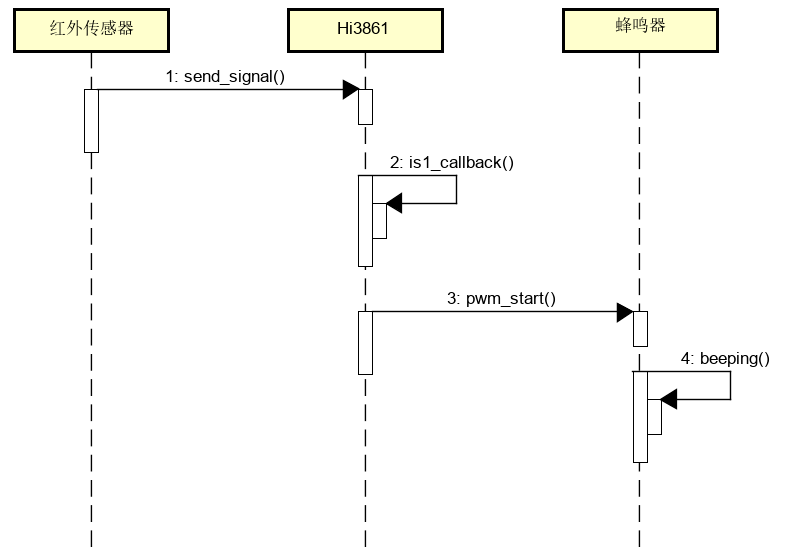
最终效果如下:
可以看到,当我靠近开发板时,红外感应器立即发送感应信号,进而触发蜂鸣器发声。
WOW!一个简单的安防系统就这么完成了!
PS:最新版 Python 引擎库能够支持几乎所有鸿蒙的外设接口,以及基础浮点运算。
感兴趣的同学可下载附件中的代码和文件自行编程尝试。
Enjoy It!
代码开源地址:
https:/ /gitee.com/delphi-tang/python- for-hos
👇点击关注鸿蒙技术社区👇
了解鸿蒙一手资讯
求分享
求点赞
求在看