超声波测量辅助肌肉外骨骼装置,实现现实环境辅助行走的个性化
超声波测量使得外骨骼实现自适应和动态个性化成为可能
超声波测量辅助肌肉外骨骼装置,实现现实世界行走的个性化
【导读】:
哈佛大学约翰·A·保尔森工程与应用科学学院 (SEAS) 的研究人员开发了一种新方法,可以根据个人情况对机器人外装辅助设备进行校准,并适应各种现实世界的步行任务。
人们很少以恒定的速度和单一的斜坡行走。我们在赶赴下一个约会地点、捕捉人行横道信号或在公园里随意漫步时会改变速度。坡度也一直在变化,无论我们是去远足还是爬上坡道进入建筑物。除了环境变量外,我们走路的方式还受性别、身高、年龄和肌肉力量的影响,有时还受神经或肌肉疾病(如中风或帕金森病)的影响。

这种人类和任务的可变性是设计可穿戴机器人以在现实世界条件下辅助或增强步行的主要挑战。迄今为止,为个人步行定制可穿戴机器人辅助需要数小时的手动或自动调整——这对于健康人来说是一项乏味的任务,而对于老年人或临床患者来说通常是不可能的。
如今,哈佛大学约翰·A·保尔森工程与应用科学学院 (SEAS) 的研究人员开发了一种新方法,可以根据个人情况对机器人外装辅助设备进行校准,并适应各种现实世界的步行任务。仿生系统使用肌肉动力学的超声波测量来为外装用户开发个性化和特定于活动的辅助配置文件。
“我们基于肌肉的方法能够相对快速地生成个性化的辅助配置文件,为步行者提供真正的好处,”该论文的共同作者、雅培和詹姆斯劳伦斯工程教授罗伯特 D.豪说。
该研究发表在《科学机器人》上。
先前为机器人外装开发个性化辅助配置文件的仿生尝试侧重于穿戴者四肢的动态运动。SEAS 研究人员采取了不同的方法。该研究是哈佛生物机器人实验室(在超声成像和实时图像处理方面拥有丰富的经验)与哈佛生物设计实验室(由康纳·沃尔什(Conor J. Walsh)运营的合作项目),该实验室的 Paul A. Maeder 工程和应用科学教授SEAS,开发用于增强和恢复人类表现的软可穿戴机器人。

研究小组将便携式超声系统绑在参与者的小腿上,并在他们执行一系列步行任务时对他们的肌肉进行成像。
SEAS 博士后研究员、论文的共同第一作者 Richard Nuckols 说:“我们使用超声波查看皮肤下的情况,并直接测量用户在几次步行任务中的肌肉活动。” “我们的肌肉和肌腱具有顺应性,这意味着四肢的运动与驱动其运动的底层肌肉之间不一定存在直接映射。”
研究小组将便携式超声系统绑在参与者的小腿上,并在他们执行一系列步行任务时对他们的肌肉进行成像。

“从这些预先记录的图像中,我们估计了与小腿肌肉平行施加的辅助力,以抵消他们在步行周期的推出阶段需要执行的额外工作,”大学研究生 Krithika Swaminathan 说。 SEAS 和文理研究生院 (GSAS) 以及该研究的共同第一作者。 研究生、该研究的共同第一作者 Sangjun Lee 说。“通过这种方法,外骨骼不会压迫穿着者,而是与他们融洽成为一体。”
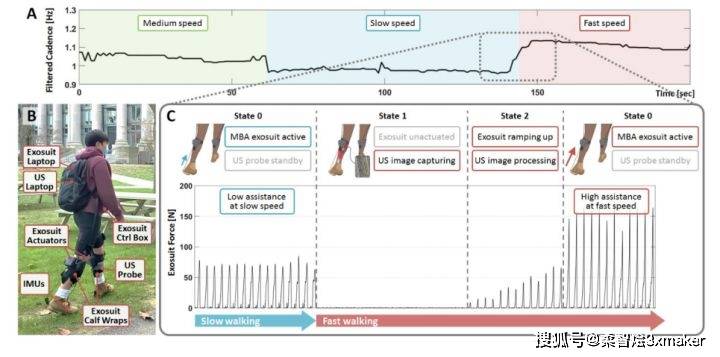
新系统只需要几秒钟的步行,甚至一步就足以捕捉肌肉的轮廓。
对于每个超声波生成的配置文件,研究人员随后测量了该人在佩戴和不佩戴外装时行走时消耗的代谢能量。研究人员发现,外装提供的基于肌肉的辅助显着降低了在一系列步行速度和坡度下行走的代谢能量。
与之前发表的研究相比,外装还施加了较低的辅助力,以实现相同或改善的代谢能量益处。
“通过直接测量肌肉,我们可以更直观地与使用外装的人一起工作,”SEAS 和 GSAS 的
在现实环境中进行测试时,外装能够快速适应步行速度和倾斜度的变化。
接下来,研究团队的目标是测试系统,不断进行实时调整。 该论文的资深作者 Walsh 说:“这种方法可以通过提供舒适、量身定制和自适应的帮助,帮助支持可穿戴机器人在现实世界的动态环境中的采用。”








